
Mechatronics
Autonomous Delivery Robot

Project Objective:
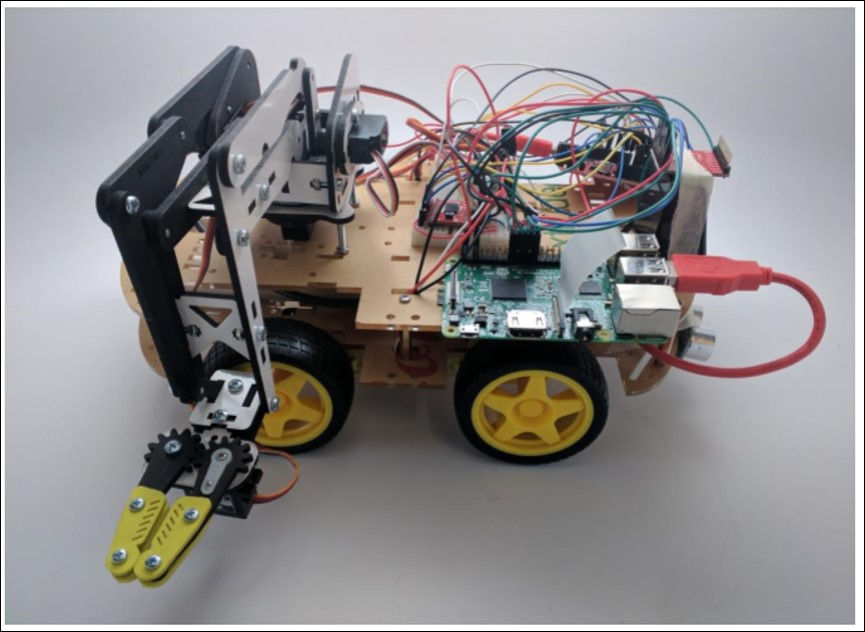
The objective of this project was to "Design and build an autonomous driving robot that provides parcel pickup and drop service inside a pre-defined warehouse environment". The robot was to be a completely stand-alone entity operating on a combined Raspberry Pi (RPi) and Arduino Uno platform and powered by a 5000 mAh portable battery. The total expenditure was limited to $200. The navigation was done through a Raspberry Pi which implemented a line follower and obstacle detector to reach the target parcel's coordinates, safely & quickly.
My Role:
I worked on the Arduino Uno in developing and controlling the drive and gripper sub-systems. To achieve effective driving and steering of the robot, H-bridge motor driver circuit was implemented to control individual wheel RPM and line detection was used to follow straight lines. A pair of ultrasonic sensors were used to sense any sudden obstacles in the path and avoid a crash. A 3 DOF robotic arm gripper was used to grab and hold the parcel (made out of foam-core) during the ride. To ensure effective picking & droping of parcels, kinematic path following was performed to determine the offset between gripper and the parcel.
Project Contributors:
Team Members: Sourabh Chikode, Yiemeng Liu, En Xiao